


?
什么是无人机避障技术
避障技术,即无人机自主躲避障碍物的智能技术。无人机自动避障系统能够及时地避开飞行路径中的障碍物,极大地减少因为操作失误而带来的各项损失。

无人机避障技术的发展阶段
无人机只能是简单地感知障碍物。当无人机遇到障碍物时,能快速地识别,并且悬停下来,等待无人机驾驶者的下一步指令。
无人机能够获取障碍物的深度图像,并由此精确感知障碍物的具体轮廓,然后自主绕开障碍物,是摆脱飞手操作,实现无人机自主驾驶的阶段。
无人机能够对飞行区域建立地图模型然后规划合理线路,是目前无人机避障技术的最高阶段。
这三个阶段是无人机避障技术的作用过程。从无人机发现障碍物,到可以自动绕开障碍物,再达到自我规划路径的过程。
无人机避障类
红外线避障的常见实现方式是三角测量原理。红外感应器包含红外发射器与CCD检测器,通过发射红外线在物体上进行反射,反射的光线被CCD检测器接收之后,由于物体的距离D不同,反射角度也会不同,不同的反射角度会产生不同的偏移值L,知道了这些数据再经过计算,即能得出物体的距离了。
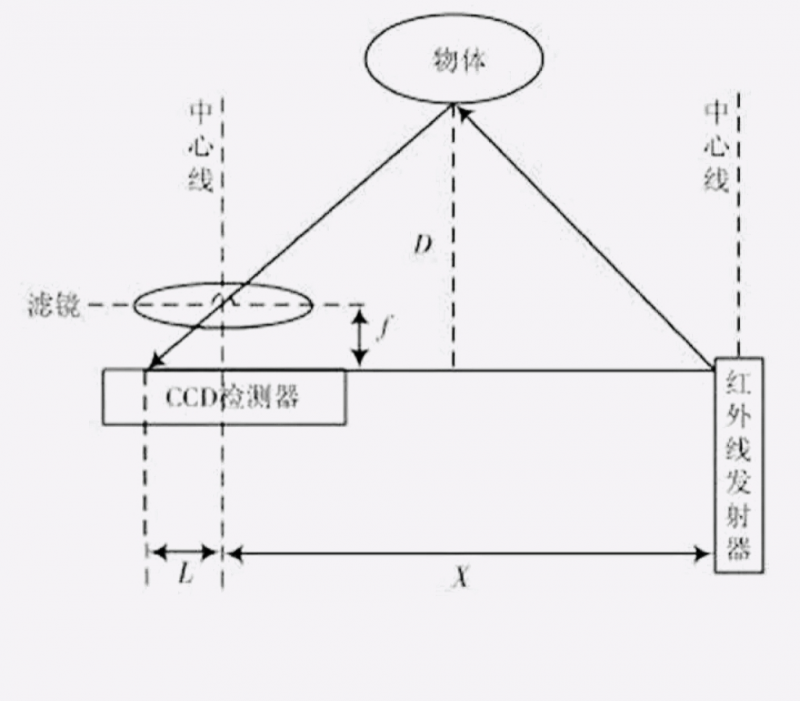
三角测量原理示意图
超声波避障
超声波测距的原理是声波遇到障碍物会反射,而声波的速度已知,所以知道发射到接收的时间差,就能计算出测量距离,再结合发射器和接收器的距离,就能算出障碍物的实际距离。
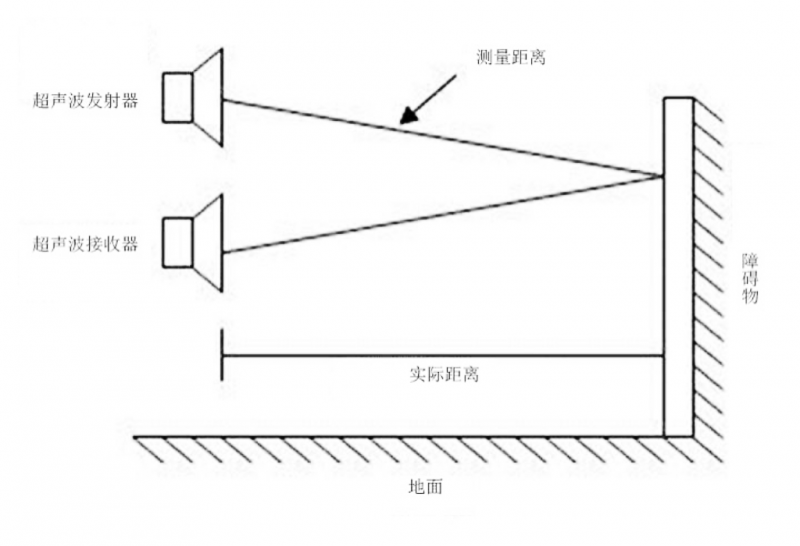
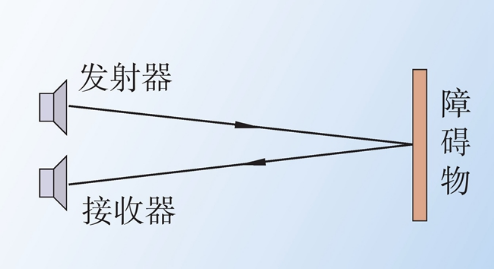
超声波避障原理示意图
激光避障与红外线类似,也是发射激光然后接收。激光传感器的测量方式很多样,有类似红外的三角测量,也有类似于超声波的时间差+速度。
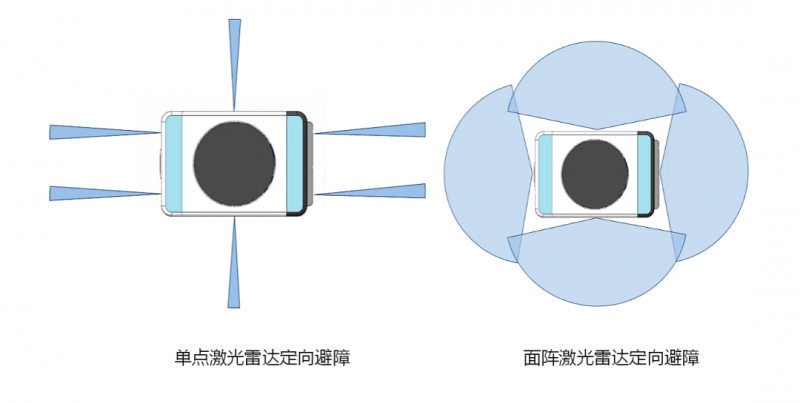
无论是哪种方式,激光避障的精度、反馈速度、抗干扰能力和有效范围都要明显优于红外和超声波。
解决机器人如何“看”的问题,即计算机视觉。其基础在于如何能够从二维的图像中获取三维信息,从而了解我们身处的这个三维世界。
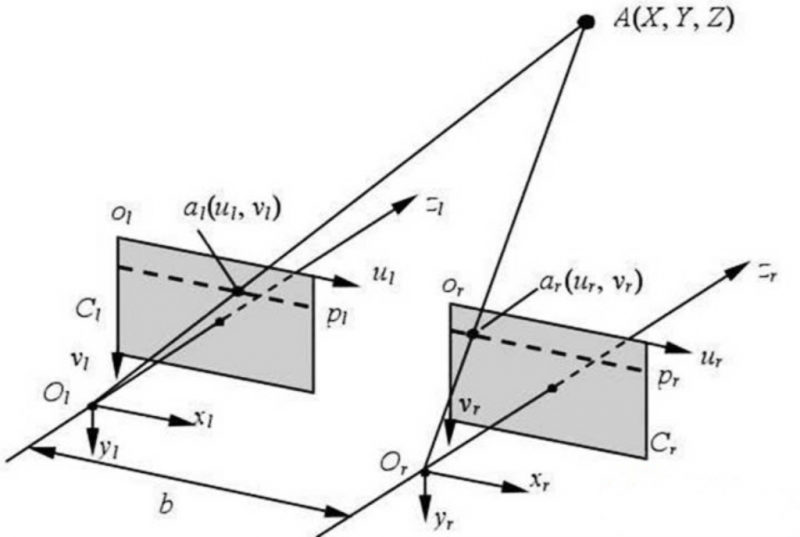
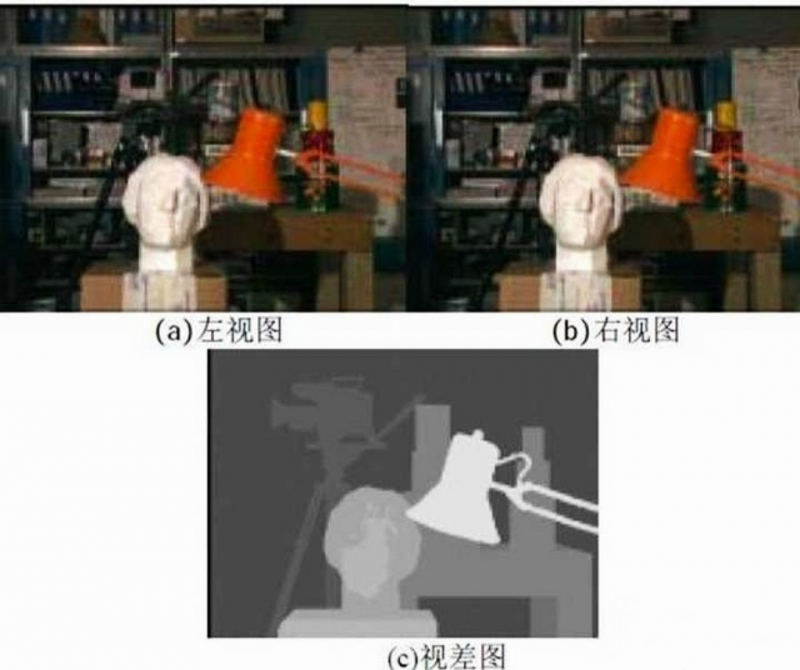
无人机双目视觉避障示意图
避障功能的普及是无人机行业发展的大势所趋,在提升无人机作业场景广度的同时,使无人机能够适应更复杂严苛的飞行环境,高效智能完成任务需求。未来,结合多样化的无人机避障技术,涵涡无人机将深度应用到各行业领域,让无人机智能化更进一步。
“素材来源于网络侵删”
 品胜
品胜 新品发布|全新极飞 P 系列 2020 款农业无人机
新品发布|全新极飞 P 系列 2020 款农业无人机 新品发布|极飞 R150 2020 款农业无人车播撒版
新品发布|极飞 R150 2020 款农业无人车播撒版 【2月24日 19:00】《三农课堂》第30期—小麦中后期病虫草害防治技术
【2月24日 19:00】《三农课堂》第30期—小麦中后期病虫草害防治技术 XAAC 2020极飞科技年度大会新品发布会
XAAC 2020极飞科技年度大会新品发布会 【视频直播中】极智领先·目视未来 2021极目科技年会
【视频直播中】极智领先·目视未来 2021极目科技年会 新品发布|极飞 R150 2020 款农业无人车割草版
新品发布|极飞 R150 2020 款农业无人车割草版 北京保定周边吊运打药统防撒肥随叫
北京保定周边吊运打药统防撒肥随叫 保定周边吊运打药撒肥随叫随到
保定周边吊运打药撒肥随叫随到 保定周边吊运打药撒肥随叫随到
保定周边吊运打药撒肥随叫随到 无人机打药
无人机打药 北京保定周边吊运打药撒肥统防随叫随到
北京保定周边吊运打药撒肥统防随叫随到 保定周边吊运打药撒肥随叫随到
保定周边吊运打药撒肥随叫随到 喷洒用水量大,播撒均匀力大,动力持久
喷洒用水量大,播撒均匀力大,动力持久 无人机吊运,光伏,竹子,光伏
无人机吊运,光伏,竹子,光伏












